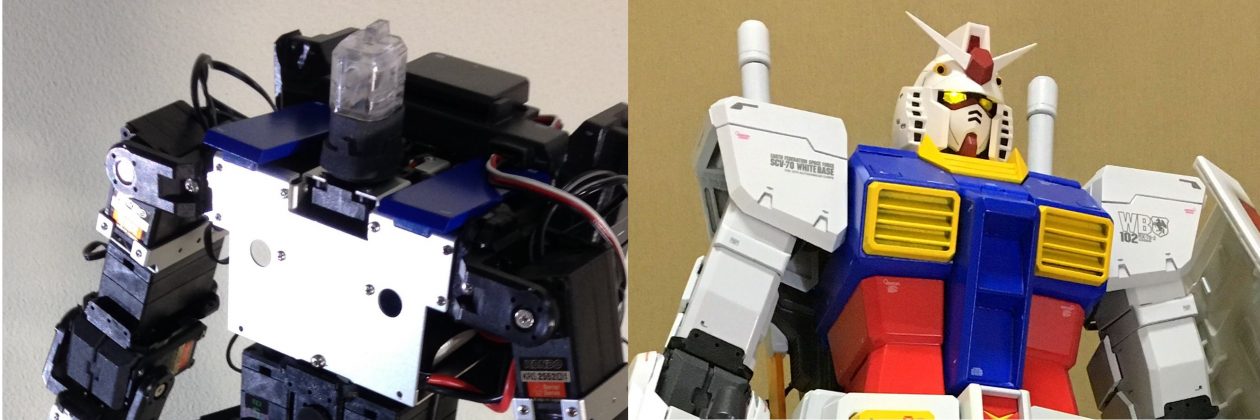
ベースロボットはKHR-3HV にほぼ決めましたが、今回はどうやってガンダム化していくかについてお話します。
まず、KHR-3HVを使ってガンダムを作るにあたり、どうしても実現したいのが、足を長くすること。KHR-3HVは見た目ではそれほど短足には見えないのですが、それは腰の部分まで足に見えるからのようです。実際に腰部分の装甲をつけてみると、今どきのガンダム像と比較して、かなりの短足になってしまうことがわかりました。
また、KHR-3HVで使用されているサーボモータは調査した結果、近藤科学で扱っているもののなかではサイズと形状とパワーのバランスが最も良いことがわかり、このモーター”KRS-2552″の使用は外せません。そしてこのモーターを使ったとしても果たしてガンダムのようなスリムな足にすることができるのか、大きな懸念事項です。
そのためにどうするかを調査検討し、ひとつの答えに行き着きました。
まず、足を長くするためにはKHR-3HVの足の部分のアルミ板パーツを自作しなくてはなりません。当然プラ板とは違うので、自分で切り出すことはできません(そんな工作機械は持っていません)。よって自分でパーツ形状を設計して、その後は加工サービスを請け負ってくれる業者さんにお願いしなければなりません。例によってネットを使ってそういう業者さんを探します。すると、なんということでしょう!KHR-3HV の発売元の近藤科学が運営するロボットサービスショップで加工をやってくれるそうです。
ROBOSPOT
ご利用案内 → 切削サービス
さすが、ユーザーによるカスタマイズを前提としたKHR-3HV を販売しているだけありますね。これで、足の内部フレーム長さを延長させる目処が立ちました。
次に、果たしてガンプラのようなスリムな足が実現可能なのかを確認する方法ですが、これは延長した足フレーム全体の図面を引いてみて、さらにそれを骨として周りに装甲を貼り付けしてみて検証するしかないです。私の感じ方の問題ですので。
ちょっと話がそれますが、今回のGLC企画ではひとつ新しい試みを追加したいと思っています。ガンダムの装甲をどうやって作り込むかですが、5年前ぐらいから話題となっている3Dプリンタを使ってみてはどうかと。
正直なところ私は
プラ板の切り出し⇨貼り付け⇨整形
の「繰り返し作業」が面倒で好きではありません。スクラッチしていると同じ形の部品を複数作らないといけない時があるじゃないですか。一回目の作成は好奇心があるので大丈夫なんですけど、二回目以降は結果の分かっている作業なので面倒になってしまうんですよね。他にも、
- 今回は本家であるGundam Global Challengeのリミットである2019年の前には完成させておきたい。
- プラ板やパテによる整形・製作ではロボットのハードなアクションに耐えられない可能性もある。簡単に”パキッ”と壊れては困ります。
- ハードなアクションによりパーツの損傷があったときに替えの部品を簡単に製造したい。
- 静態展示用ではなく、動く&歩くガンダムなので、当然軽量化は考えなければならないし、左右の重心バランスを取る、つまり、右半身と左半身の重さを全く同じにする必要がある。
などの課題があります。これらを払拭するため、3Dプリンタの使用は打ってつけというわけです。
3Dプリンタで造形するには、元となる3Dデータの作成も必要です。3Dデータの作成のためには3D-CADを使います。3Dプリンタの選定と3Dデータの作成方法についてはまた後で詳細を説明しますね。
参考)3D-CADの選定
話を元に戻します。
KHR-3HV をベースにしてガンダムのスリムな足が実現できるかについては、3D-CADを使って検証することとします。
長くなりましたがここらでまとめます。
[お題] どうやってKHR-3HV をベースにガンダムを作り上げるのか?
=> 以下の手順で実行します。
- KHR-3HV を長足化する(改造用の新規アルミパーツは3D-CADで設計し、ROBOSPOTで製造を行ってもらう)
- KHR-3HVをベースフレームとしたガンダムの装甲を3D-CADを使って設計する。
- 3D-CADで作った各装甲の設計データを高精度3Dプリンタを持っている業者に送り、造形してもらう。
- 造形してもらったパーツを塗装し、ベースフレームに組込み&貼付けする。
- お好みのガンダムアクションをKHR-3HVの付属ソフトHTH4を使ってPC上で設計する。
以上となります。

