今回は本企画を思い立った動機についてお話しします。
プロフィール〜GLC開始まで でも述べたように始めのきっかけは1/1ガンダムを動かすというガンダムグローバルチャレンジプロジェクトの発表なのですが、当時、二足歩行ロボットとガンダムをキーワードに検索していた際に、とあるヤフー知恵袋の質問を見つけました。
「どうしてガンダムファンは二足歩行ロボットをやらないのか?」という質問。これは、「どうしてガンプラやる人は二足歩行ロボットには手を出さないのか?」と言い換えられると思います。この質問に返す私の考えは以下となります。
- そもそもホビー用二足歩行ロボットという趣味のジャンルが頭にない。もしくは知っていても頭の中でガンダムとリンクしていない。
- ガンダムのようなスタイルの良いロボットは、ホビー用二足歩行ロボットでは技術的に実現できないだろう。もしくは、万が一作れたとしても、劇中のようなカッコいいアクションは期待できないので面白くなさそう、と考えている。
- 予算的に手が出ない。
- 二足歩行ロボットは難しそう。
確かに二足歩行ロボットは趣味としては高額の部類です。かく言う私も始めるときは、15万円ドブに捨てることにならないのか?と迷い躊躇したものです。ところが今では面白くて、取りつかれたようにせっせと開発しているわけですが(笑)。
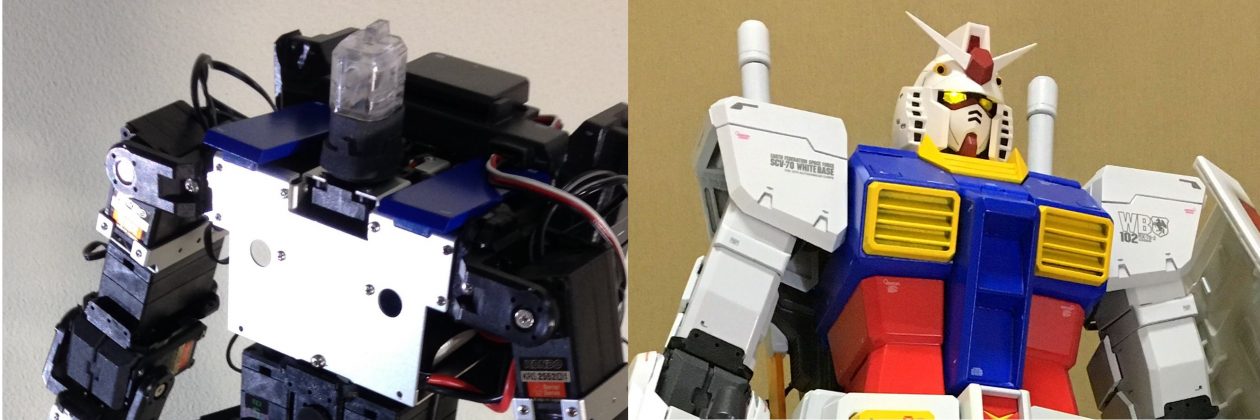
3と4は置いておいて、まずは1と2の人が大多数だと思うのです。では、ガンプラファンの人が、二足歩行ロボットでもガンプラのようなかっこいいスタイルが実現出来る、つまりガンプラを操縦できることを知ったらどうなるのか?やるやらないは別として、恐らく興味のない人はそんなにいないのではないでしょうか?(と信じているわけです) であるならば、まずは私が実験してみましょう、という思考が、GLCを始めたもう1つのきっかけなのでした。
そして、、、今に至ります。100%完璧にできた訳ではありませんが、見ている人の何人かには興味・ワクワク感を持ってもらえる一品ができたのではないか?と、これまた勝手に信じています。クルマが趣味の人や旅行が趣味の人、もちろん二足歩行ロボットが趣味の人も含め、趣味にある程度高いお金をかけている人がいることも事実です。中には趣味の域を超えて二足歩行ロボをやっている人・団体もいることでしょう。それに、二足歩行ロボットをやるには電気に関する初歩的な知識は必要と思いますが、ガンプラでスクラッチ改造をしているような人たちならば問題なく組み立てやフレーム・装甲設計が出来ると思うのです。何が言いたいかと言うと、きっかけさえあれば、二足歩行ロボットでもガンプラのようなかっこいいスタイルが実現出来る!と分かれば、ガンプラを真剣にやっている人の0.1パーセントぐらいは二足歩行ロボットもやってみよう!と思ってくれるのでは?ということです。
以前、二足歩行ロボットバトルを見に行きましたが私の愛するガンダムのような、かっこいいと思えるスパロボはいませんでした。想像するに、ガンダムのような足長・高重心・重装甲では勝てないのでしょう。おそらく、生粋のガンダムファンならば、二足歩行ロボットは別モノと認識してしまうと思ったのです。
今、想いはエスカレートしています。今回作ったGLCガンダムでは、重量過多や歩行の不安定性によりロボワンの予選も勝てないでしょう。そこで、RX-78でなければならないという制約を取り払い制作の自由度をある程度確保した上で、ガンダムファン、スパロボファンを魅了するようなデザインも保ちつつ、さらにはロボットバトルでも十分戦えるような”スーパーホビーロボット”を作ること、それが次の私の目標です。
そして、、、
” 飛ぶ “
にも挑戦してみる予定です(飛ぶといっても、とりあえず1mぐらいのジャンプが目標)。正確には”跳ぶ”になりますかね。
GLCはある程度うまくいく見通しが立ってからブログを始めましたが、次の挑戦はガチンコです。しょーもないポンコツが出来るのか?平々凡々なロボットが出来るのか?とんがったロボットが出来るのか?世の中を驚かすようなハイスペックなロボットが出来上がるのか?乞うご期待!そのうち新しいブログも開設します。記事のアップデート頻度は今のペースとあまり変わらないと思いますので、気長にお付き合い頂けると幸いです。
私のような人間が増えて、将来、リアルガンプラバトルのようなことができたらいいですねぇ・・・夢です。
GLCのほうも、ちゃんと進めております。右手首の修理部品が届いて、組み上げまで終わりました。これから各指の動きを連動させるチューニングを始めるところです(これがまた面倒くさいのですが)。
以上、長文にお付き合い頂きありがとうございました。それではまた。