この件につきましては、
の①をご覧くださいませ。左右の金具を入れ替えてKHR-3HVの組み立てマニュアルどおりに作ればOKです。
簡単で恐縮ですが、以上です。
KHR-3HVの足部分の延長についてお話しします。
ノーマルKHR-3HVの足はこちらをご参照ください。
[参考] http://kondo-robot.com/ (近藤科学のROBOT製品サイト)
これを以下のように改造したいと思います。この長さで右側の外部装甲のサイズ・形状となります。

太もも部には2つのサーボ―モータが格納されます。オリジナルのKHR-3HVはこの2つに角度がついており平行でないのですが、今回の改造では平行方向で配置します。
オリジナルで2つのサーボモータ間に角度がついている理由は確認していませんが、恐らく膝を曲げた時に太もも部とすね部を密着するまで曲がるようにするためなのではないかと考えています(こちらをご参照ください)。ガンダムはそこまで膝が曲がる必要がないというか、そこまで一重関節で曲がるようにしてしまうと、外部装甲の形状が大きく損なわれてしまうので、ガンダムとしての形状をできるだけ保持しつつ可能な限り曲がるレベルが達成点になります。この膝のサーボモータは上図のように水平面に直立の方向で設計を進めます。
最近のプラモでは二重関節を使って膝が180°曲がるような構造となっているものもありますが、今回は二重関節にはしなかったというか、設計当時は二重関節案を検討する思考がありませんでした。
今回自作したアルミパーツの分解図が以下となります。板厚は全て1mmです。
ポイントというほどのことでもありませんが、サーボモータのでっぱり部分がはまるように穴を空けてあり、あとは外部装甲を固定しやすくする工夫をいくつか施しました。
このアルミパーツを製造用に図面化し、ROBOSPOTで製造を行ってもらいます。
2次元の図面が必要となるので、以下のように196mmx196mm内に収まるように展開して並べ直します。

※ROBOSPOTに発注の際には、加工ルールを守る必要があります。最大加工可能サイズに関しても制限がありますのでご注意ください。
発注するために、上記のデータをDesign Spark Mechanical上で、二次元用の***.dxfファイルに保存し直しします。
作成した***.dxfファイルをROBOSPOTに送付し、パーツの加工を依頼します。
依頼し、製造されたものがこちらです。

まだバリが残っている状態なので、バリを削る必要があります。
バリ取りナイフ(スクレーパー)で表面を滑らかにしましょう。ROBOSPOTには多様な工具が置いてあり、注文した人は無料で使わせてくれます。アルミパーツを90°曲げる器具も貸していただけます。
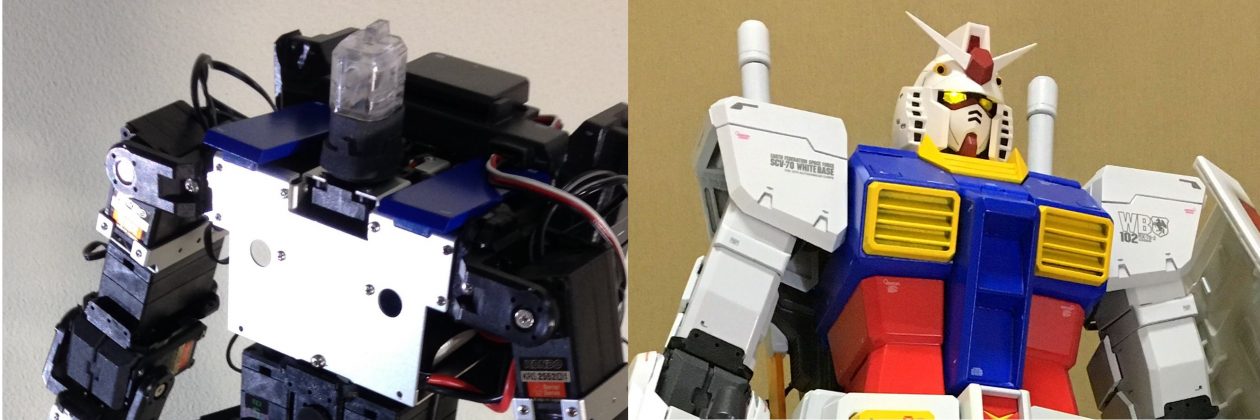
そうして出来たアルミパーツを本体に組み込んだものが以下です。

まず第一歩の改造を無事に終えることができ、感動したことを覚えております。(ほっ)
なお、足を延長することにより、標準のケーブル長では長さが不足してしまいます。そのため、以下を購入しています。
このセットの「ZH接続ケーブルB(ZH⇔サーボコネクタ)550mm」2本が必需品です。もともとKHR-3HV付属の脚部サーボケーブルは450mmなので、100mmも延長すると足首のサーボまで届かなくなります。ZH接続ケーブルは単品で買うと割高なので、セット品で購入するのがおすすめです。実際、5軸拡張も行ったので無駄がありませんでした。
それではまた。
KHR-3HV をガンダム化するための改造ポイントを以下に紹介します。
個々の詳細についてはこの後説明していきます。
なお、上記4, 9, 10についてはメーカー指示のオプション改造で、説明書はWebからダウンロード可能です。
(参考)近藤科学製品マニュアル
KHR-3HVオプション搭載マニュアル(5軸拡張オプション) Ver1.2
KHR-3HVオプション搭載マニュアル(ジャイロKRG-4)
{kind=link}
{kind=link}