事前検討の最終課題になります。
KHR-3HVの下半身をガンダム化できるのか?について検証します。
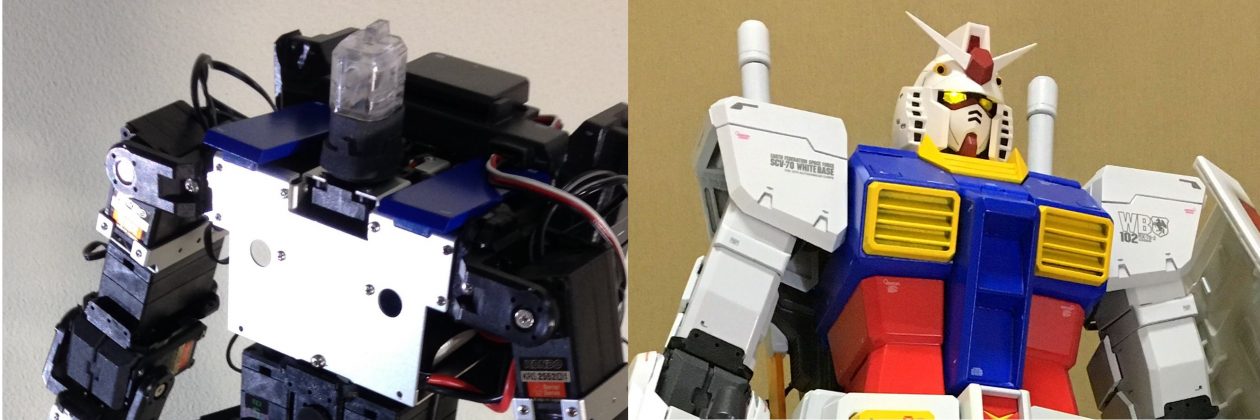
まず、KHR-3HVの下半身をよ~く見つめます。
そして気になった点を以下に記載します。
①股間分の両脚の隙間が狭すぎる
②足が短い
③ケーブルがある。ザクならいいんですけどね。
④左右方向に関節部が太い。幅広。
⑤股関節がボールジョイントでない。足の付け根の前後運動する関節がガンダムと比べて低位置
こんなところです。これから一つ一つについて細かく対応策について検討していきます。
①股間分の両脚の隙間が狭すぎる

この図の○の隙間が狭く、ガンダムのふんどし部分のスペースが十分取れません。なので、四角で囲んだ2つの金具を左右入れ替える処置で課題がクリアできそうです。次のようになります。これなら大丈夫そうです。

②足が短い
以前もお話しましたが、これだけは譲れません。足を延長します。下記のKHR3-HVとガンダム用に設計した足の長さを見比べてみれば一目瞭然ですね。およそ10cm長くなっています。①も含め、歩行動作が難しくなる改造となりますが、この設計で突っ走ります!


③ケーブルがある。ザクならいいんですけどね。
上記左側KHR-3HVの足写真を参照ください。各サーボモータをチェーン接続するためのケーブルが両脚の外側に配線されています。これはもうどうしようもないです。ガンダムの装甲を設計する際にできるだけケーブルを隠す(しまう)ように気を遣うことで可能な限り回避する方針とします。
④左右方向に関節部が太い。幅広。
上記②の写真を見てもらえればわかりますが、膝部分の関節の左右幅がけっこうあります。この形状でガンダムのような足(下記左図)が再現できるのか、半信半疑でしたが、頑張ってCADを駆使して可能な限りスリムに設計してみました。下記右図を御覧ください。なんとか許容範囲でいけそうです。


⑤股関節がボールジョイントでない。足の付け根の前後運動する関節がガンダムと比べて低位置
基本的にガンダムの股関節はボールジョイントで、人の股関節と同様の作りになっています。今のホビーロボット市場にそのような動作が可能なモーターは存在しません。よって3つのサーボモーター(=つまり3つの回転軸)で3次元の動きができるようになっています(①の画像を参照ください)。このとき困るのが、前後方向の回転軸が一番下に配置されてしまっており、ガンダムの腰部のフロントアーマー(黄色い四角のついてる部分)が、膝を上げたときにつっかえ棒になってしまう懸念があります。
これについては、課題を意識して、膝を上げた際にうまく腰アーマーもスライドできるよう、工夫していきます。(アイデアはいくつかありますが、これは実物を使って試行錯誤する他ないので、この場でのこれ以上の説明は省きます。
以上、説明してきましたが、①~④については、構造上の問題は何とかできそうな感触です。⑤も工夫で何とかいけると考えていますので、今回の課題もクリアの判定とします。
よってここまでのすべての課題がどうにかなりそうな結論となりましたので、晴れてお金を投入して本プロジェクトを本始動させる踏ん切りがつきました。
次回の投稿ではプロジェクト推進計画を明確にして、事前検討編を終了にしたいと思います。